
























热门搜索

水域长程大视角激光雷达的研制
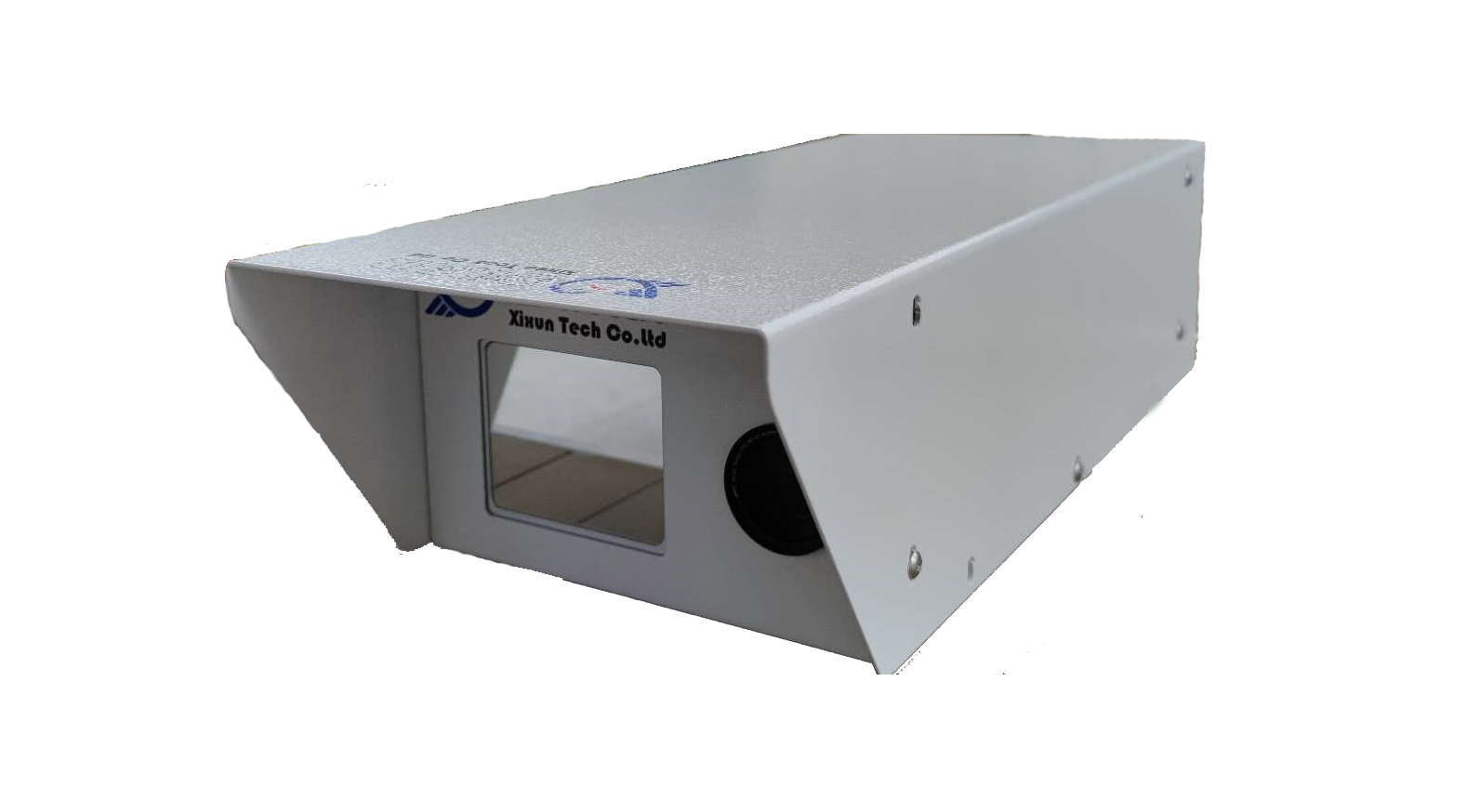
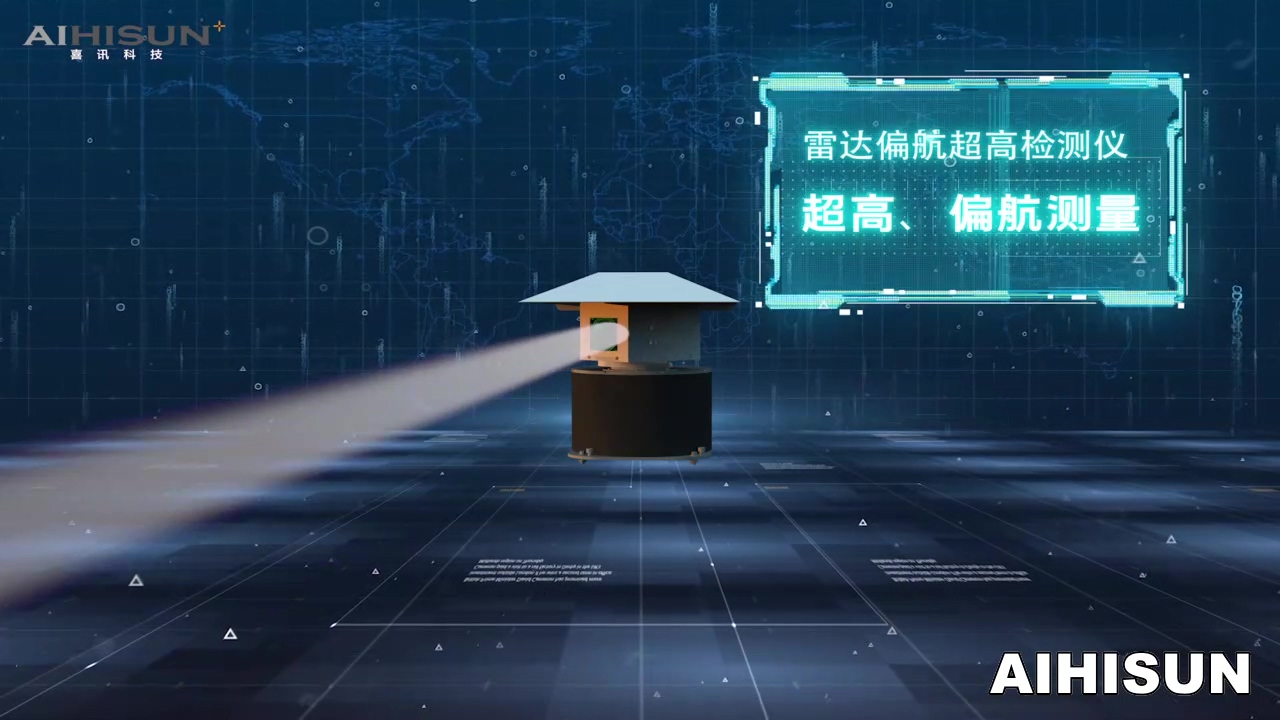
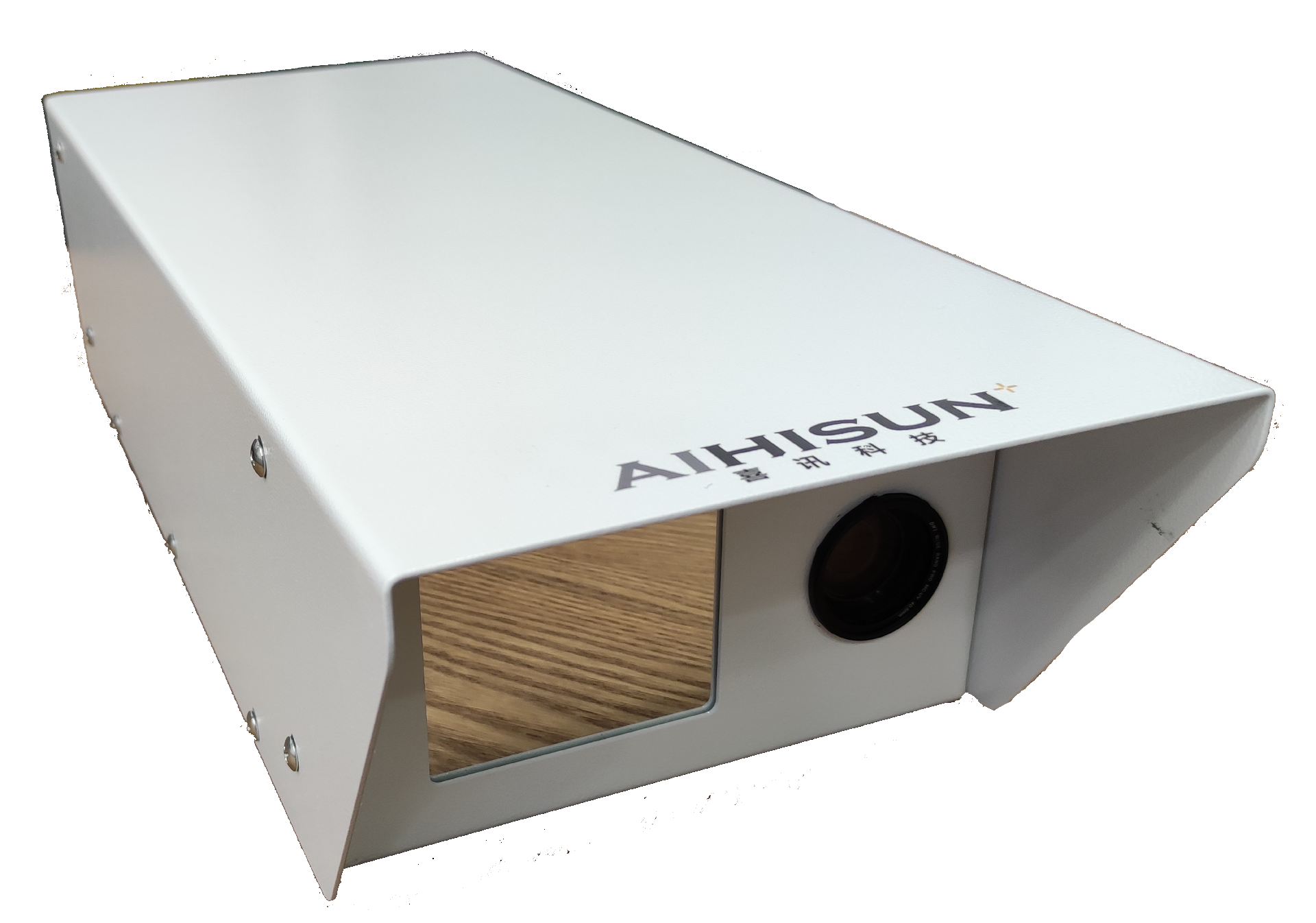
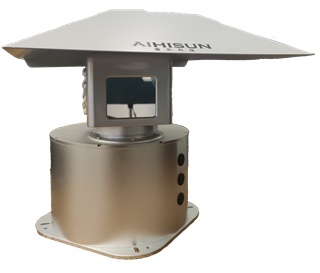
受益于国内自动驾驶用多线激光雷达的快速落地,目前128线以上多线激光雷达价格呈数量级降低,使得多线激光雷达应用于桥梁主动防船撞系统跨越性价比鸿沟,该技术开发成为可能。但市面上已有商用产品暂时还没有一款兼具长程和大FOV探测能力。采用成熟长程探测多线激光器,构建往复运动云台,通过惯性元件获取云台角度实现点云的实时同步配准,使得雷达具备大FOV探测能力。
三维点云的无监督分类算法及滤波
激光雷达以每秒24万点的频率对空间进行扫描,需要对点云进行滤波和聚类,实现环境、水面与船舶目标点云的实时检测。采用开源PCL+VTK框架实现跨平台应用,由于点云数据量巨大,为保证实时性需要对核心KD-tree聚类算法进行优化和加速部署。
激光点云的多目标跟踪算法
重点解决点云目标船舶BOX的运动估计,ID频繁变换以及跟踪框和检测框的匹配问题。采用kalman滤波实现目标的运动估计,匈牙利贪心算法实现ID的大概率匹配。
船舶超高检测技术
目前已有超高量测方法多数基于主动激光探测方式,由于光学聚焦和扩散,发射出的光斑存在光束角,该角度典型值在0.1度左右。因此在1000m出会形成高达2m直径的光斑,光斑大小决定了该距离下测量的理论分辨率。该物理原理决定了所有主动激光探测方案在满足高度探测精度为1m的前提下其测量距离不能大于500米。

11km处光斑的大小:d=1000*2*pi*0.12/360= 2.09m





