
























热门搜索

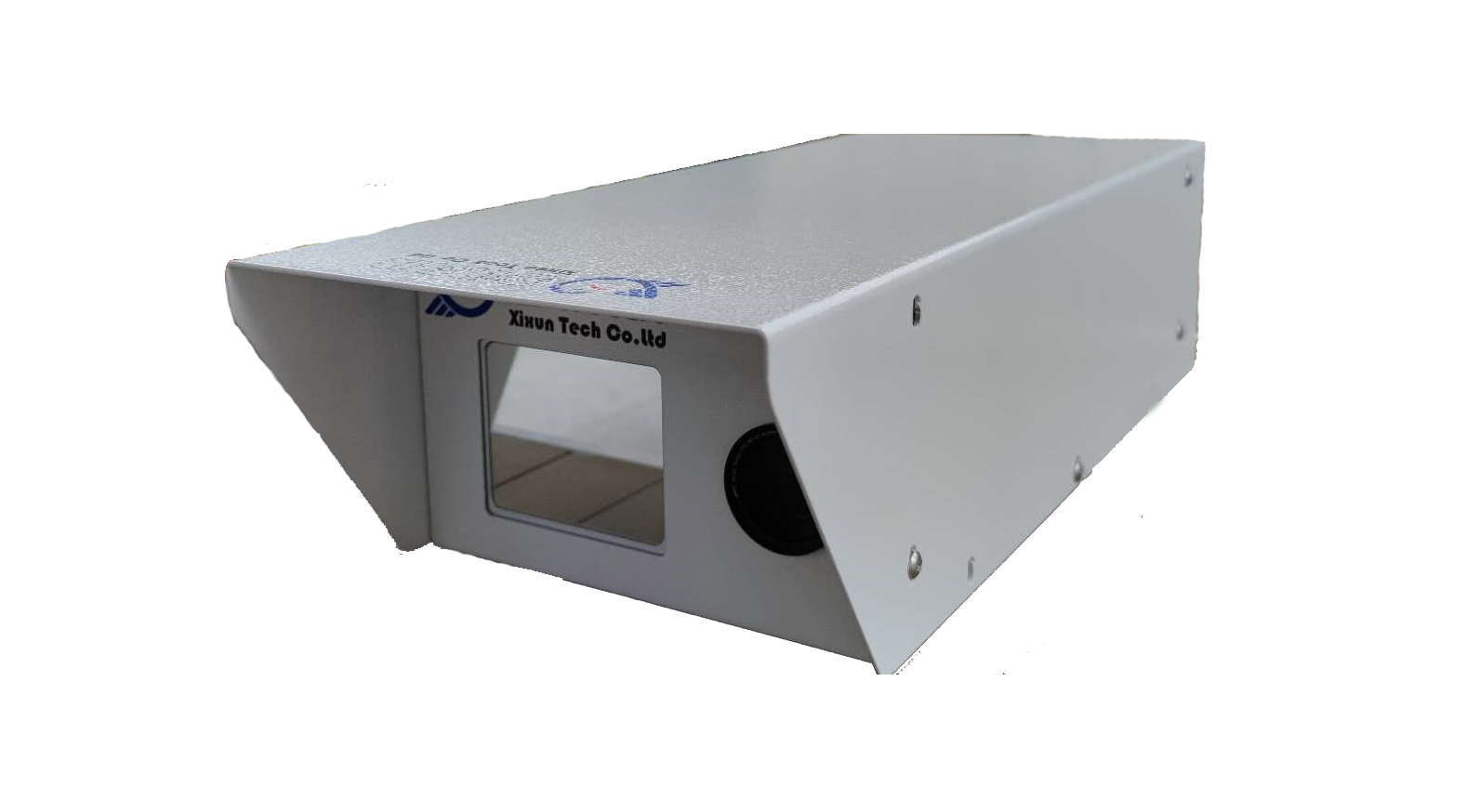
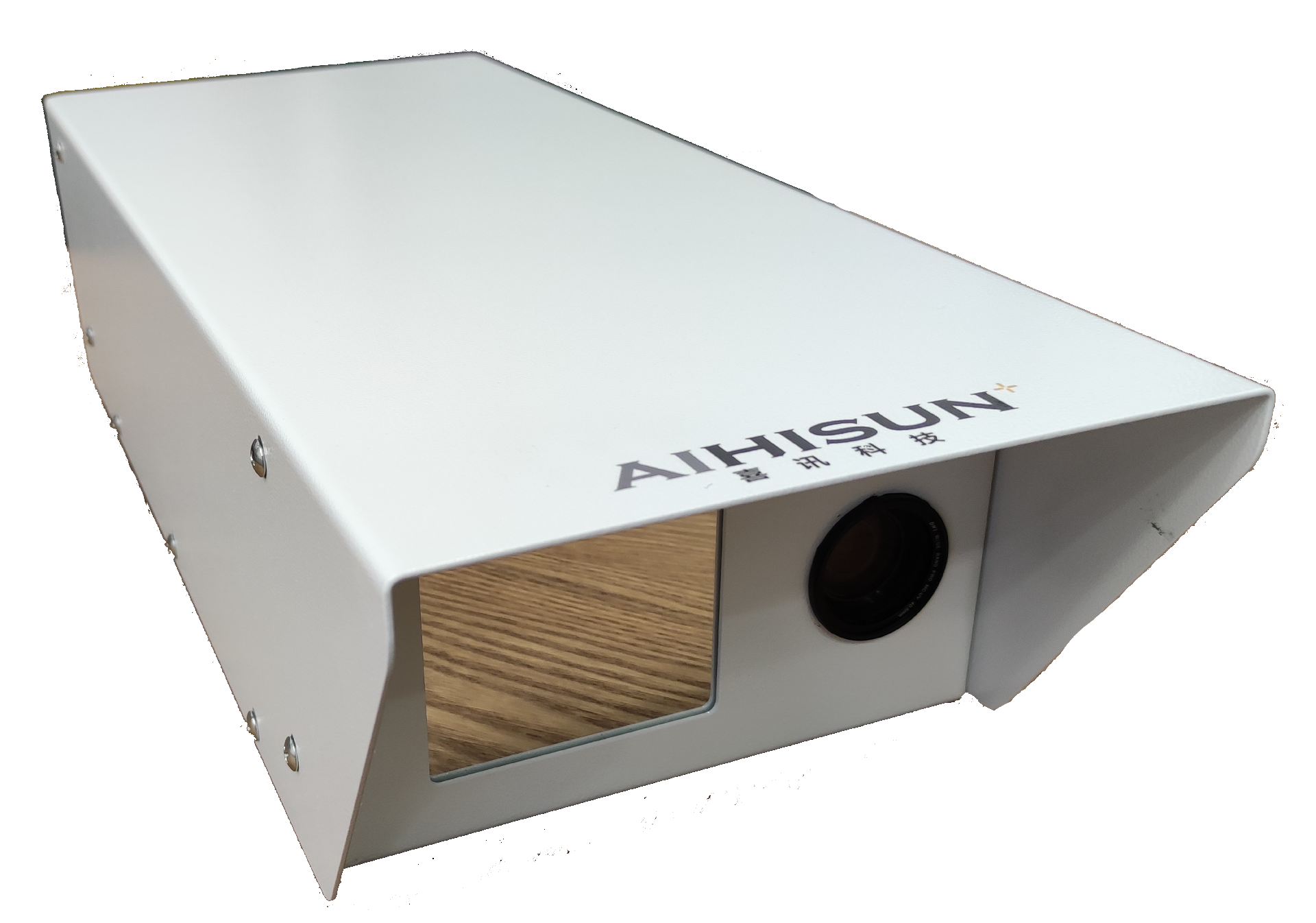
多线激光雷达通过高密度的线束和每秒数十万次的探测频率向空间进行三维的测量,通过内部旋镜可构造非重复的扫描策略,使得在足够的积分时间内产生高密度非重复三维点云,可以获取船舶的完整立体信息。
由于没有维度的缺失,使得标定的方法可以采用便捷的RTK高精定位无人机方法(厘米级),且标定结果可作为外部参数对设备进行软设置,无需现场调整,可定期进行检定。依据航道等级可在桥体或上下游立杆安装。在精度方面,激光传感器的指向性好,分辨率高,通过每秒发出的24万束点云,从而获取毫米级的船舶三维数据,不受昼夜、光照、气候等观测环境因素的影响,同时可实现7×24小时全自动无间断连续探测。该技术可对检测区500米范围内的船舶进行三维扫描,因其精度高且不受环境因素的干扰,在径内500米左右其点云视场覆盖率达到最大值,可快速捕捉视场中的每个细节,在其有效监测范围内,若发现船舶超高,随即发出红色超高警告,责令船舶停止行进并确认船舶高度,避免船舶因超高撞击桥梁,保障桥梁安全。
多线激光雷达技术由于具备三维量测能力,使得偏航与超高测量可以一次完成,因此其关键技术与偏航检测大体复用,能大大减少项目开发投入和时间





