
























热门搜索

桥梁主动防船撞系统主要功能是通过安装在桥区的现场感知设备测量水面船舶的平面或空间信息,防止超高和偏航两类危及桥梁安全的事件发生,因此量测手段是保证系统结果可靠的前提。
基本原理:目前已有量测方法基本上都是基于主动激光探测方式,由于光学聚焦和扩散,发射出的光斑存在光束角,该角度典型值在0.1度左右。因此在1000m出会形成高达2m直径的光斑,光斑大小决定了该距离下测量的理论分辨率(图1)。

该物理原理决定了所有主动激光探测方案在满足高度探测精度为1m的前提下其测量距离不能大于500米。
船舶超高意味着不能通过桥梁,需要船舶在到达桥梁前实现完全的制动,速度必须减速至静止,根据Topley[1]提出的船舶停车冲程计算经验公式和邱民[2]统计的实船运动性能,各吨位的船舶停船距离均值/标准差见表1。该物理原理决定了所有主动激光探测方案在满足高度探测精度为1m的前提下其测量距离不能大于500米。
可见,在>1000吨级通航船舶(>500m制动距离)的航道量测传感器必须安装在上下游满足最大制动距离处。不同量测方法的设备对布设支撑构建物的要求成为成本的主要因素。如果只具备空间线或者面的高度探测能力需要安装在通航限高

等高处意味着需要建造巨大的铁塔结构,如果具备空间检测能力则只需要做低矮的立杆安装,中间成本相差数量级。
<1000吨级通航船舶(<500m制动距离)的低等级航道则都可以采用安装于桥梁主体的安装方式。高处意味着需要建造巨大的铁塔结构,如果具备空间检测能力则只需要做低矮的立杆安装,中间成本相差数量级。
以下对桥梁防船撞主动预警系统中采用的几种超高主动激光探测方式做对比和分析说明。
1.1 激光对射式测量
1.1.1发射端与接收端分别立于河道两岸
这种检测方法只能在桥梁上下游满足通航船舶最大制动距离的两岸安装(图2)。在预警高度安装激光发射器及激光接收器,根据激光接收器是否被遮挡检测船舶是否超高,这种方法的优点是灵敏度高,通过发射和接收传感器的高度的物理调整来标定高度位置,意义明确,但是调整和维护困难。但是要在上下游要建造与桥梁通航净高相当高度的激光传感器支撑构造物(需构建4个支撑塔),造价高,当河道跨度大于500米时,受到天气影响和高空晃动的因素增加,误报事件多。

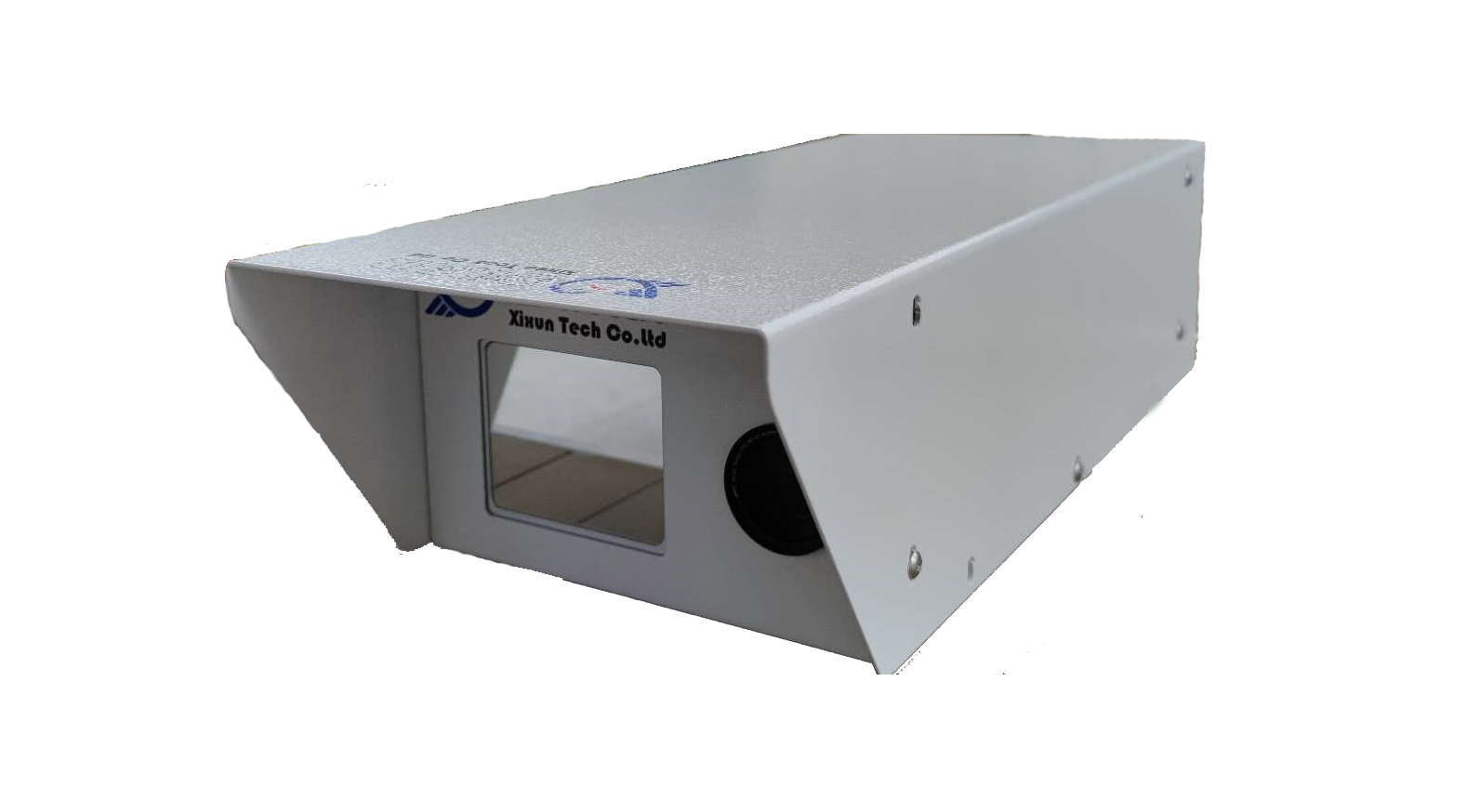
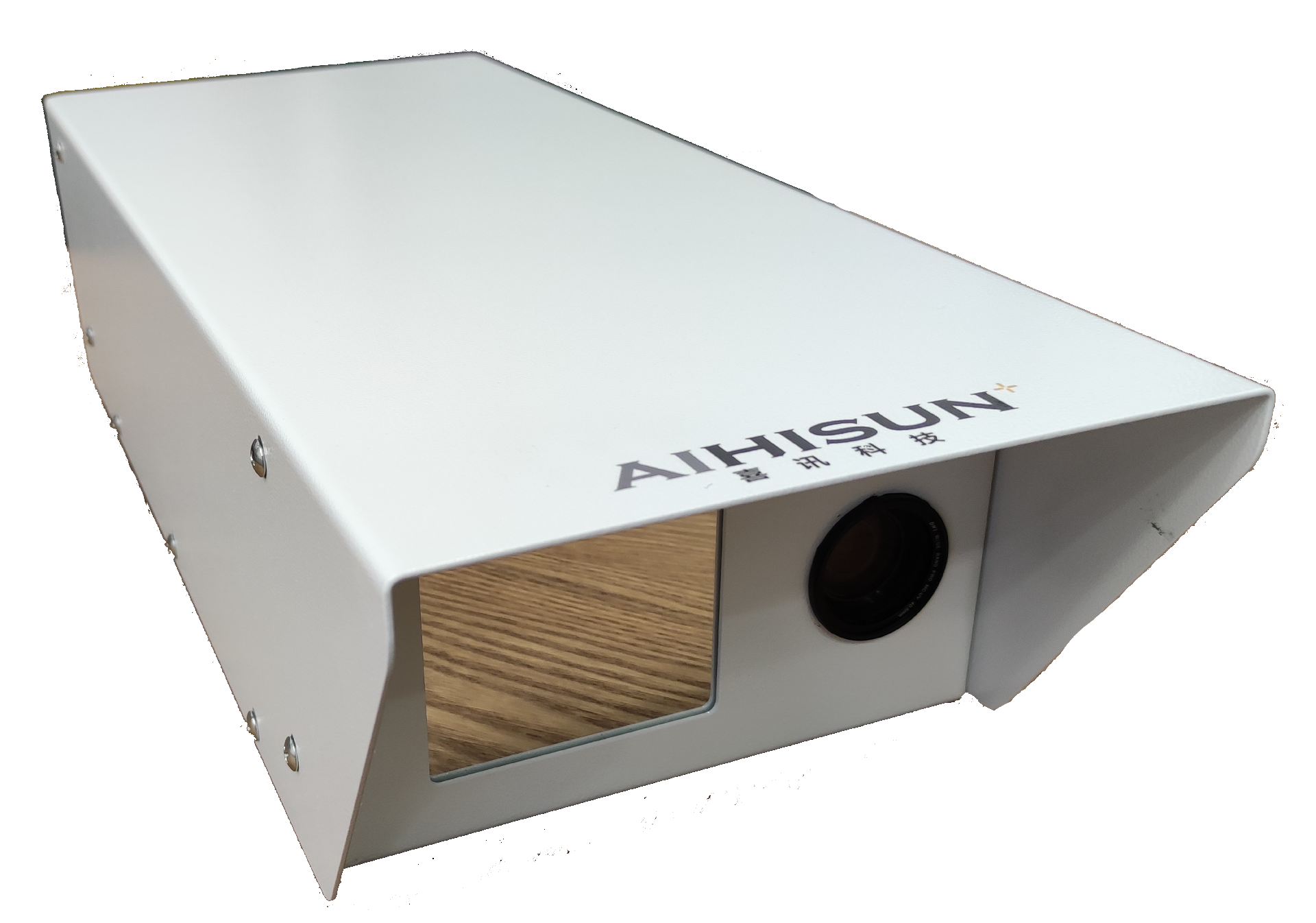
1.1.1发射端与接收端位于同一端
这种检测方法原理上是对射式测量方式的改良方法。发射和接收同端,并且能够量测到目标离传感器的距离。在上下游只需各建造一座支撑塔。该方式因为是线探测方式,需要对岸有合适高程目标进行标定、调整和维护困难,不确定性大。反射式测量目标的反射率影响测量结果,易受天气等外界的影响,另外,长距离激光测距传感器的测量频率普遍只有20次/秒左右甚至更低,这样低的测量频率极容易造成漏报。
在低通航等级(<500m制动距离)航道该方式也可安装于桥梁主体,具体安装和工作方式有以下两种:
1.1.3 交叉式安装
这种测量方式是在通航孔的两侧的超高预警高度安放一个固定的激光测距仪进行探测(图3),成本增加了一倍。该方式是线检测方式,安装在桥梁斜向检

测存在很大的检测死区,水面无固定高程标靶导致标定极难完成,调整和维护困难。
1.2单线激光测距面扫描
这种检测方法是在桥梁上下游的通航孔预警高度各安放一台扫描式激光测距仪对航道的预警高度平面进行扫描测距(图4),根据返回测量的数据判断是否有超高物体,该方式因为是通过线旋转构造成的面探测方式,需要进行俯仰和横滚两个角度的标定,标定、调整和维护困难。

1.3多线激光雷达方式
多线激光雷达通过高密度的线束和每秒数十万次的探测频率向空间按照一定的进行三维的测量,通过内部旋镜可构造非重复的扫描策略,使得在足够的积分时间内产生高密度非重复三维点云,可以获取船舶的完整立体信息。由于没有维度的缺失,使得标定的方法可以采用便捷的RTK高精定位无人机方法(厘米级),且标定结果可作为外部参数对设备进行软设置,无需现场调整,可定期进行检定。依据航道等级可进行桥体和上下游立杆安装。
1.4 视频分析法测高方式
该方式因缺乏实际测绘学意义上的精度支撑,同时受干扰因素太多,实际应用中也因为其精度无法衡量,且误报频繁,不建议采用。
综上所述,能基本满足目前船舶超高检测需求的测高方式推荐采用多线激光雷达方案。但是对于河道特别宽,超过1000米的,目前基于民用技术的传感器还没有能力达到。但安装了超高检测预警,驾驶员收到信息后减速,即使最后不能完全停船,也能将超高事件造成的影响大大降低。
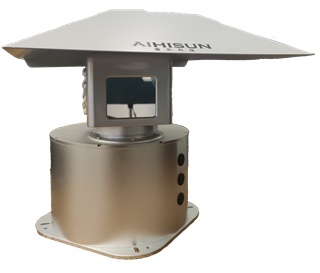
以下是多线激光雷达测高的两种安装方式:

多线激光雷达以前价格昂贵,随着国内智能驾驶的激光雷达的规模化量产,目前价格已经跟平民化,用于水
上探测是其耐候性和防护需做特别加强。
2 船舶偏航检测技术
目前用于检测船舶偏航的主要技术有基于AIS的船舶位置识别技术及基于图像识别的越界检测技术、基于微
波雷达的船舶位置识别技术和基于多线激光雷达的三维船舶探测技术。
2.1 AIS系统:船舶自动识别系统(Automatic Identification System, 简称AIS系统)
AIS 消息提供三类数据,其中包含:
1.船舶静态数据,包含船名、呼号、MMSI、IMO、船舶类型、船长、船宽等;
2.船舶动态数据,包含经度、纬度、船首向、航迹向、航速等;
3.船舶航程数据,包含船舶状态,吃水,目的地、ETA等。
利用船舶AIS提供的位置信息对船舶行驶位置进行判断其是否偏航。具有距离远、数据准确、不受天气影
响的优点。
缺点:船舶位置的信息是根据船舶安装的GNSS设备进行定位的,定位精度在10m级,且接收的是天线的
点信息,安装在船舶的不同位置就会有数十到上百米的误差,且完全没有船舶的轮廓信息。且AIS信号的发送
是通过公用频道进行播报,信息的更新时间从数十秒到分钟级不定,完全不具备实时性。
综上,AIS具有系统必备的长程船舶驶入流域感知和身份识别功能,无法完成偏航检测所需要的亚米级实
时轮廓探测能力,需要配合其它实时高精度探测方法来进行精准量测。
2.2 图像识别:
是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术,在桥梁上架
设可见光或者热成像摄像机,对桥区航道的图像进行识别处理,可以判断是否有船舶进入非航道区域,该方
式表现直观,由于缺乏深度信息,摄像头平面图像很难标定到地图坐标,并且受限镜头的FOV,在探测距离
和探测范围上无法同时满足。受限于光的传播特性在极端大雾和大雨情况下探测距离会有明显衰减,算法构
建复杂,不具备实体的边缘探测能力,结果的可靠性无法保证。
2.3 微波航海雷达(Marine radar)
船上用于航行避让、船舶定位、狭水道引航的雷达,亦称船用雷达。航海雷达在能见度不良时为航海人
员提供了必需的观察手段。使用雷达检测船舶位置的方法在现代船舶上被普遍使用,雷达识别船舶位置具有
距离远、不受天气影响的优点。微波雷达根据回波获取目标平面信息,天线的波瓣角决定其定位精度,目前
民用级在数度的级别,探测精度在500m处有数十米的误差。且内河航道背景复杂,目标回波信号的提取、
辨别、跟踪处理复杂,误判较高。
2.4 多线激光雷达
原理同1.3,通过云台和旋镜的往复旋转,对多角度点云进行配准可以获取在500m处全流域亚米级精度
的船舶的三维轮廓,通过RTK无人机标定技术可以快捷对雷达进行亚米级位置标定。该种方式信息来源没有
维度确实,点云处理算法较为成熟,检测结果可靠。受限于光的传播特性在极端大雾和大雨情况下探测距离
会有明显衰减,用于水上探测是其耐候性和防护需做特别加强。
参考文献
1:国际桥梁与结构工程协会(IABSE ) .《交通船只与桥梁结构的相互影响》(综述与指南).1991-09.
2:岩并·聪.关于船舶对桥梁的安全设施[J].中国航海,1986(2):153-164.





